六軸機械手臂搭配雷射模組做打標、清潔、切割
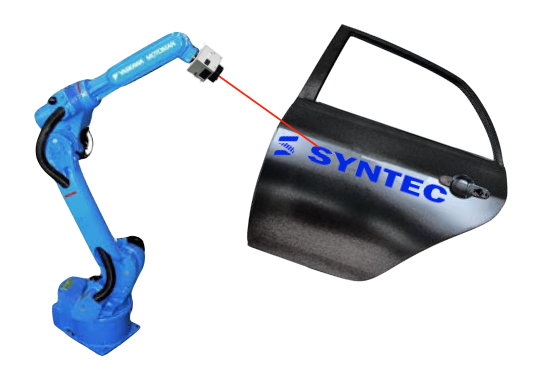
一: 主要組成: 手臂+雷射模組做打標
二:技術目的
證明新代科技的技術水平以提供客戶多樣化的客制情境。另更換功率做雷射切割或清潔也屬相似技術。
藉以提供顧客多樣化的打標情境。另更換功率做雷射切割或清潔也屬相似技術。
三:應用情境說明
針對大型或多角度的工件,進行打標、切割或銲接等雷射加工時,可透過新代提供的手臂及雷射控制器方案來滿足:
1. 彈性的路徑規劃。
2. 系統間串接友善。
3. 可擴充視覺模組定位,系統自行校正。
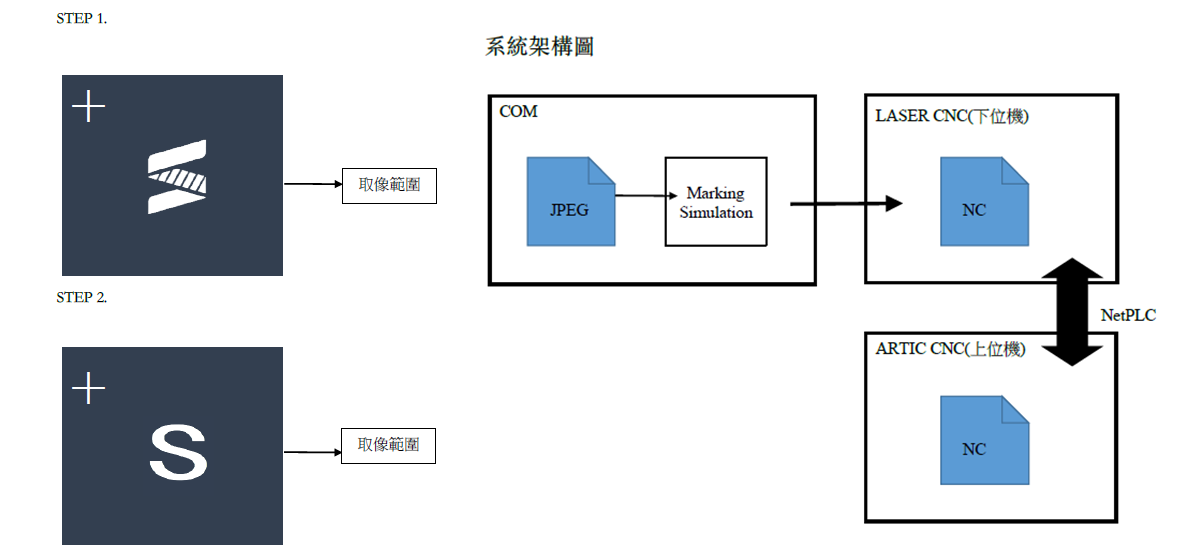
運作流程
1. 機械手臂末端點移動至第一個打標點的約略位置。(可由另一支機械手臂夾取工件到固定架)
2. 經由攝像頭進行取像,利用樣板學習功能確認標記位置。
3. 利用已知的標記位置推算打標的中心點座標。須建立打標程式﹡
4. 將此位置回饋至手臂使振鏡模組移動至打標的中心點座標(標記點右下方)。
5. 開始打標,打標完成後另一隻手臂取下工件。重複1~5 的步驟,依序將Logo 打完(如以下舉例STEP1、STEP2)。
※巨集程式
放在手臂上進行主控,在距離校正完之後,利用NetPLC 達成控制打標機打標的任務。